


Уровнемер
|
Хит 
В наличии Быстрый просмотр
|
В наличии: Достаточно
Артикул: SPA-390-4
Ультразвуковой датчик уровня EasyTREK SPA-390-4 для контроля уровня жидкости.
|
Цена:
107 187 руб./шт
-
+
Заказать
Купить в 1 клик
|
||||||||||||||||
|
Хит 
В наличии Быстрый просмотр
|
В наличии: Много
Артикул: IL-EC-A
Ультразвуковой датчик уровня INNOLevel ECHO IL-EC-A для контроля уровня жидкости.
|
Цена:
67 780 руб./шт
-
+
Заказать
Купить в 1 клик
|
||||||||||||||||

В наличии Быстрый просмотр
|
В наличии: Мало
Артикул: MBA-516-B
Магнитострикционный измеритель уровня NIVOTRACK MBA-516-B для контроля уровня жидкости. Исполнение с жестким зондом.
|
Цена:
244 264 руб./шт
-
+
Заказать
Купить в 1 клик
|
||||||||||||||||||
|
Хит 
В наличии Быстрый просмотр
|
В наличии: Мало
Артикул: XSON-DLM-M-100
Контактный датчик XSON-DLM-M-100 контроля уровня жидкости в скважинах, глубина измерения до 100 метров.
|
Цена:
54 027 руб./шт
-
+
Заказать
Купить в 1 клик
|
||||||||
|
В наличии Быстрый просмотр
|
В наличии: Мало
Артикул: XSON-DLM-M-50
Контактный датчик XSON-DLM-M-50 контроля уровня жидкости в скважинах, глубина измерения до 50 метров.
|
Цена:
44 707 руб./шт
-
+
Заказать
Купить в 1 клик
|
||||||||

В наличии Быстрый просмотр
|
В наличии: Много
Артикул: ULM-70N-06-G-I-B1-D
Ультразвуковой датчик уровня ULM-70N-06-G-I-B1-D для контроля уровня жидкости.
|
Цена:
136 327 руб./шт
-
+
Заказать
Купить в 1 клик
|
||||||||||||||
|
Распродажа АКЦИЯ

В наличии Быстрый просмотр
|
В наличии: Достаточно
Артикул: DLM-35XiT-40-G3/4-I-A-E200-K2
Емкостный датчик уровня DLM-35XiT-40-G3/4-I-A-E200-K2 для контроля уровня жидкости и сыпучих материалов. Исполнение со стержневым, не изолированным электродом. Специально предназначен для измерения уровня топлива в баке.
|
Цена:
37 103 руб./шт
73 922 руб. /шт
-
+
Заказать
Купить в 1 клик
|
||||||||||||||||||||

В наличии Быстрый просмотр
|
В наличии: Мало
Артикул: FGA-AR4S30500 !L=420mm
Поплавковый магнитный датчик уровня FGA-AR4S30500 !L=420mm для контроля уровня жидкости. Общепромышленное исполнение.
|
Цена:
81 085 руб./шт
-
+
Заказать
Купить в 1 клик
|
||||||||||||

В наличии Быстрый просмотр
|
В наличии: Мало
Артикул: ULM-53N-10-G-I-G-T
Ультразвуковой датчик уровня ULM-53N-10-G-I-G-T для контроля уровня жидкости.
|
Цена:
109 790 руб./шт
-
+
Заказать
Купить в 1 клик
|
||||||||||||||

В наличии Быстрый просмотр
|
В наличии: Достаточно
Артикул: ULM-70N-20-F-I-B1-D
Ультразвуковой датчик уровня ULM–70N–20–F-I-B1-D для контроля уровня жидкости.
|
Цена:
254 624 руб./шт
-
+
Заказать
Купить в 1 клик
|
||||||||||||||

В наличии Быстрый просмотр
|
В наличии: Достаточно
Артикул: DLM-35N-22-G1-I-C-E1500
Емкостный датчик уровня DLM-35N-22-G1-I-C-E1500 для контроля уровня жидкости и сыпучих материалов. Исполнение со стержневым, изолированным электродом
|
Цена:
62 026 руб./шт
-
+
Заказать
Купить в 1 клик
|
||||||||||||||

В наличии Быстрый просмотр
|
В наличии: Много
Артикул: ULM-70N-10-G-I-B1-D
Ультразвуковой датчик уровня ULM–70N–10–G-I-B1-D для контроля уровня жидкости.
|
Цена:
151 131 руб./шт
-
+
Заказать
Купить в 1 клик
|
||||||||||||||
|
В наличии Быстрый просмотр
|
В наличии: Мало
Артикул: DLM-35N-22-G1-I-C-E2000
Емкостный датчик уровня DLM-35N-22-G1-I-C-E2000 для контроля уровня жидкости и сыпучих материалов. Исполнение со стержневым, изолированным электродом
|
Цена:
68 210 руб./шт
-
+
Заказать
Купить в 1 клик
|
||||||||||||||||
-00R-ГП")
В наличии Быстрый просмотр
|
В наличии: Достаточно
Артикул: LMP 307 451-1001-1-1-1-1-3-2-010 (10 m PUR)-00R-ГП
Гидростатический датчик уровня LMP 307 451-1001-1-1-1-1-3-2-010 (10 m PUR)-00R-ГП определения уровня жидкости.
|
Наши менеджеры обязательно свяжутся с вами и уточнят условия заказа
Под заказ |
||||||||||||||||
|
В наличии Быстрый просмотр
|
В наличии: Достаточно
Артикул: DLM-35N-22-G1-I-C-E1200
Емкостный датчик уровня DLM-35N-22-G1-I-C-E1200 для контроля уровня жидкости и сыпучих материалов. Исполнение со стержневым, изолированным электродом
|
Цена:
58 372 руб./шт
-
+
Заказать
Купить в 1 клик
|
||||||||||||||

В наличии Быстрый просмотр
|
В наличии: Достаточно
Артикул: MPM489W-H010-E-V5-A2-22-00-P1-L015-N-N
Гидростатический датчик уровня MPM489W-H010-E-V5-A2-22-00-P1-L015-N-N для определения уровня жидкости.
|
Цена:
14 401 руб./шт
-
+
Заказать
Купить в 1 клик
|
||||||||||||||||||||
Похожие категории
С товарами этой категории часто смотрят
Рекомендуемые
Уровнемеры — это точные приборы для измерения уровня жидкости, сыпучих материалов и любых других веществ в различных емкостях. В химической промышленности и при переработке нефти и газа используются различные виды уровнемеров, в том числе вибрационные модели. Каждый прибор является важной частью системы контроля и состоит из отдельных элементов, обеспечивающих стабильную работу в сложных условиях и используются как указатели предельного заполнения емкостей. Для вязких сред разработаны специальные модели, которые корректно измеряют плотность веществ. Уровнемеры монтируются в трубах, листах, трубопроводах, где находится контролируемый продукт. Оборудование обеспечивает постоянный контроль параметров при эксплуатации. Важно учитывать технические требования и условия использования. В зависимости от расхода и характеристик продукта подбираются оптимальные решения. В комплексе с другой арматурой и приборами обработки данных обеспечивается эффективное управление технологическими процессами. При монтаже используются различные соединения, обеспечивающие герметичность и надежность системы. Наши персональные консультанты помогут выбрать подходящие другие устройства для решения ваших задач.
Существует множество приборов, с помощью которых можно установить контроль уровня жидкостной среды в резервуаре.
Задача измерителей уровня жидкости – отслеживать в непрерывном режиме, как происходит наполнение емкости. Для этого используют различные физические принципы в зависимости от характеристик сосуда, вещества и промышленных процессов.
Типы уровнемеров для промышленных резервуаров

Снятие данных и считывание сигнала можно выполнить разными способами. Уровнемеры для жидкости различают по принципу действия:
- Поплавковый. Выталкивающая сила удерживает поплавок на поверхности. Он перемещается одновременно с понижением или подъемом уровня. Механическая система передачи сигнала может дублироваться магнитными датчиками.
- Байпасный. Работает по принципу сообщающихся сосудов. Устройство устанавливается на внешней поверхности резервуара. С внутренним объемом трубка прибора герметично соединяется фитингами.
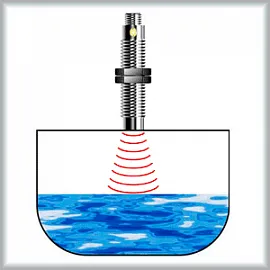
- Ультразвуковой. Устройство улавливает отраженный от поверхности жидкости ультразвуковой сигнал. Таким образом фиксируется изменение расстояния.
- Радарный. Радиолокатор принимает частотный сигнал. Высокая точность и цифровизация данных позволяют интегрировать такой уровнемер в АСУ ТП.
Измерители уровня жидкости имеют более трех десятков различных принципов устройства: гидростатические, скважинные и др. Мы рассмотрели наиболее востребованные в современном производстве.
Датчики измерения уровня жидкости
Устройства хорошо интегрируются в систему автоматизации производства. В бытовых агрегатах уровнемеры могут быть вмонтированы в саму конструкцию.
Наиболее простыми в обслуживании и отказоустойчивыми признаны байпасные магнитные индикаторы, на которые установлены датчики уровня жидкости. Они дают возможность не только производить измерение высоты жидкостного столба, но и визуально наблюдать изменение уровня на шкале.
Почему стоит выбрать наши уровнемеры?
Товары и услуги компании «РусАвтоматизация» отличаются долговечностью и гарантированным качеством. Это подтверждает международный сертификат ISO 9001:2015 на многие из них. Рентабельное собственное производство, продуманная логистика позволяют нам устанавливать цены ниже средних в регионе. На нашем сайте можно изучить прайс, а в онлайн-чате получить подробную консультацию.
Видео
Смотрите все видео, где вам удобно
![]()
![]()
![]()
Статьи
-
 Проверка точности измерений бывает разной: где-то требуется официальная метрологическая оценка, где-...28.10.2025
Проверка точности измерений бывает разной: где-то требуется официальная метрологическая оценка, где-...28.10.2025 8 мин.
8 мин. -
 В статье рассмотрена важность контроля уровня жидкости и его предельных значений в технологических р...31.08.2025
17 мин.
В статье рассмотрена важность контроля уровня жидкости и его предельных значений в технологических р...31.08.2025
17 мин. -
 Чтобы решить задачу по контролю уровня, необходимо подобрать датчик по принципу действия. От этого з...31.07.2025
15 мин.
Чтобы решить задачу по контролю уровня, необходимо подобрать датчик по принципу действия. От этого з...31.07.2025
15 мин. -
 Современный элеватор – это высокотехнологичный комплекс, где автоматизация становится ключом к повыш...30.05.2025
11 мин.
Современный элеватор – это высокотехнологичный комплекс, где автоматизация становится ключом к повыш...30.05.2025
11 мин. -
 В статье описаны основные этапы технологического процесса получения растительного масла на примере п...28.02.2024
В статье описаны основные этапы технологического процесса получения растительного масла на примере п...28.02.2024 -
 Автоматизация технологических процессов на пищевых предприятиях необходима для сокращения доли ручно...01.11.2022
Автоматизация технологических процессов на пищевых предприятиях необходима для сокращения доли ручно...01.11.2022 -
 Деаэраторы – устройства для очистки воды от растворенных коррозионно-агрессивных газов. Для не...28.10.2021
Деаэраторы – устройства для очистки воды от растворенных коррозионно-агрессивных газов. Для не...28.10.2021 -
 Ультразвуковые датчики – и уровнемеры, и сигнализаторы – широко применяются в самых разн...17.07.2020
Ультразвуковые датчики – и уровнемеры, и сигнализаторы – широко применяются в самых разн...17.07.2020 -
 Измерение уровня нефтепродуктов – довольно сложная задача, которая требует тщательного по...13.01.2021
Измерение уровня нефтепродуктов – довольно сложная задача, которая требует тщательного по...13.01.2021 -
 Не все знают, что в процессе производства получается огромное количество первичных отходов, называем...21.05.2018
Не все знают, что в процессе производства получается огромное количество первичных отходов, называем...21.05.2018