


10 причин выбрать оптические датчики положения
Оптические датчики положения и перемещения объектов относят к фотодатчикам в связи с тем, что принцип их работы основывается на обнаружении световых сигналов. Это дает возможность применять их для решения широкого диапазона производственных задач по контролю положения и перемещения технологических узлов или единичных объектов.
|
Оптические датчики положения 
|
Оптические бесконтактные датчики положения широко применяются для контроля положения и перемещения объектов или частей технологических установок. Принцип действия оптических датчиков положения основан на измерении степени ослабления оптического луча, прошедшего путь от излучателя до приёмника.
Для повышения помехозащищённости и снижения влияния внешних источников освещения в оптических датчиках положения обычно используется модулированное излучение. Луч излучателя датчика пульсирует с частотой от 5 до 30 кГц. Излучатель датчика состоит из излучающего светодиода и питающего его генератора последовательности импульсов.
В датчиках применяют светодиоды, которые испускают импульсы света в спектре от видимого зеленого света до невидимого инфракрасного излучения в зависимости от сферы применения датчика. Излучатель, кроме того, может иметь регулировки интенсивности излучения и индикатор работы.
Приемник состоит из фотодетектора (фотодиода), демодулятора, порогового устройства (триггера) и выходных цепей (PNP или NPN транзистор с открытым коллектором, реле, аналоговый выход NAMUR, IO-link и др.). При необходимости приемник оснащается регулятором чувствительности и индикатором работы. У некоторых приборов есть функция обучающего режима TEACH-IN, чтобы датчик срабатывал на отражённый свет определённого объекта. Это можно использовать для прозрачных объектов.
Тонкости выбора оптических датчиков положения
Когда луч света от датчика достигает объекта контроля, возникают такие явления как передача, отражение и поглощение света. То, какое явление преобладает в этом случае, зависит от взаимного расположения излучателя и приемника, размеров объекта, его материала, толщины, цвета и шероховатости поверхности.
По принципу действия оптические датчики разделяют на 3 основных типа:
 |
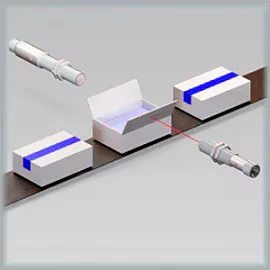
T–тип или THRU-BEAM (разнесенная оптика) или датчики на прерывание оптического луча. Состоят из приемника и излучателя, устанавливаемых друг напротив друга. |
 |
R–тип или RETRO (с отражением от световозвращателя/рефлектора). Излучатель и приемник находятся в одном корпусе. |
 |
D–тип или DIFFUSE (с отражением от объекта). Отражение оптического луча происходит непосредственно от объекта обнаружения. |
И теперь о каждом подробнее.
Датчики Т-типа
")
Датчики Т-типа имеют так называемую разнесенную оптику – излучатель и приемник располагаются друг напротив друга на некотором расстоянии. При прохождении объекта между излучателем и приёмником оптический луч прерывается, и приёмник датчика формирует выходной сигнал, сигнализируя о наличии объекта в зоне контроля. Датчики данного типа часто называют барьерными или датчиками пересечения луча. Приемник и излучатель должны быть из одного комплекта от одного производителя.
Датчики Т-типа удобны для контроля непрозрачных или хорошо отражающих объектов, но могут давать неудовлетворительные результаты при обнаружении прозрачных объектов. Так как излучатель и приемник в датчиках данного типа конструктивно выполнены в разных корпусах, что позволяет установить максимальный коэффициент усиления, то их можно использовать в условиях высокой загрязненности рабочей среды. Максимальное расстояние между излучателем и приемником, так называемая зона срабатывания, может достигать 60 м.
Зона срабатывания оптических датчиков это диапазон допустимых расстояний от датчика до объекта контроля, на которых осуществляется его обнаружение. Зона срабатывания зависит от взаимного расположения излучателя и приемника, коэффициента усиления, принципов распределения светового луча и диаметра светового пятна, так как приемник датчика срабатывает только при попадании объекта в зону светового пятна. У оптических датчиков Т-типа отсутствует так называемая «слепая» зона, поэтому зона срабатывания равна расстоянию между излучателем и приемником. Размер эффективного светового луча датчика Т-типа равен диаметру линзы излучателя и приемника. Поэтому минимальный размер объекта контроля должен быть больше диаметра линзы датчика.
Датчики R-типа
")
В датчиках R-типа приёмник и излучатель расположены в одном корпусе. Датчики данного типа для своей работы требуют установки специального рефлектора-отражателя. У датчиков положения данного типа излучатель и приемник располагаются в одном корпусе и «смотрят» в одну сторону – в сторону установленного точно напротив датчика на определенном расстоянии специального отражателя. Луч от излучателя проходит двойное расстояние: от излучателя до отражателя и в обратную сторону - от отражателя до приемника. Если на пути луча возникает объект, приемник формирует выходной сигнал. Обратная логика работы датчика может быть реализована путем установки отражателя на объекте, перемещение которого контролируется датчиком. Датчики данного типа еще называют рефлекторными. Рефлекторы, которые еще называют отражателями, катафотами или мишенями, приобретаются отдельно от датчиков. Рефлекторы могут иметь различную форму и размеры. Диапазон измерений рефлекторных датчиков положения обычно указывается при использовании конкретной модели отражателя.
Зона срабатывания рефлекторных датчиков (расстояние от линзы излучателя до рефлектора) может достигать 35 м. Размеры контролируемого объекта должны быть больше размеров применяемого рефлектора.
Рефлекторные датчики могут нестабильно работать при обнаружении блестящих объектов, отражающих световой луч датчика от своей поверхности, из-за чего датчик не сможет определить от чего произошло отражение: от рефлектора или объекта.
Для обнаружения хорошо отражающих предметов используют рефлекторные датчики с поляризационными фильтрами и специальными угловыми кубическими рефлекторами, изменяющими плоскость поляризации светового луча на 90°. Поляризационные фильтры размещаются перед линзой излучателя и приемника и пропускают только поляризованный в одной плоскости световой пучок. Излученный излучателем пучок света поляризуется в вертикальной плоскости. Световой луч, отраженный от рефлектора, имеет измененную на 90° плоскость поляризации – луч становится горизонтально поляризованным. Поэтому он без проблем проходит через горизонтальный поляризационный фильтр приемника.
Если же луч отражается от блестящего объекта, то его вертикальная поляризация не меняется, и он блокируется горизонтальным поляризационным фильтром приемника, и датчик обнаруживает этот объект.
При работе с поляризованными рефлекторными датчиками положения не рекомендуется использовать в качестве рефлектора отражающие наклейки – необходимо использовать специальные угловые кубические рефлекторы.
Некоторые модели рефлекторных датчиков способны обнаруживать стеклянные предметы, так как очень чувствительны даже к небольшой разнице между излученным и принятым световым сигналом.
Датчики D-типа
")
Датчики D-типа по конструкции и принципу действия схожи с датчиками R-типа, но отражателем в данном случае является сам контролируемый объект. Еще одним отличием от датчиков R-типа является то, что при отсутствии объекта оптический тракт оказывается разомкнутым – луч от излучателя попадает в приемник лишь при наличии объекта перед датчиком. Так как приемник датчика принимает рассеяно отраженный от объекта луч, то интенсивность этого луча сильно зависит от характеристик поверхности объекта и расстояния до объекта. Для разных материалов будут разные нормированные расстояния срабатывания. Для грубой корректировки расстояний срабатывания в зависимости от материала объекта нужно использовать корректирующие коэффициенты, указанные в руководстве по эксплуатации датчика, например:
- Матовая белая поверхность – 1,0;
- Серый ПВХ – 0,57;
- Белый пластик – 0,7;
- Черный пластик – 0,22;
- Матовый алюминий – 1,2;
- Полированная нержавеющая сталь – 2,3.
При выборе конкретной модели датчика D-типа особое внимание нужно уделить цвету и шероховатости поверхности объектов контроля. Если предполагается контролировать объекты темного цвета с шероховатой поверхностью, необходимо выбирать датчики с возможностью регулировки чувствительности.
Разновидностью датчиков D-типа являются датчики с подавлением переднего фона, заднего фона и переднего и заднего фона одновременно. Датчики с подавлением фона предназначены для обнаружения предметов на строго определенном расстоянии. Оптические датчики с подавлением фона применяются, например, для обнаружения тонких объектов, лежащих на конвейерной ленте, контроля наличия продукции в упаковке, небольшого отклонения уровня или плоскостности поверхности объекта, обнаружения объектов, движущихся в несколько рядов. Датчики с подавлением фона позволяют «разглядеть» объекты во втором ряду, не реагируя на объекты в первом, ближнем к датчику ряду и наоборот.
Регулировка расстояния обнаружения в датчиках с подавлением фона осуществляется не путем изменения его чувствительности, а методом оптической триангуляции. В конструкции датчиков данного типа имеется внутренний датчик положения (PSD – position sensor detector), который определяет угол падения отраженного от объекта луча, а значит расстояние до него. Благодаря измерению угла отражения датчики D-типа с подавлением фона могут обнаруживать все объекты на заданном расстоянии независимо от их цвета.
Максимальное расстояние срабатывания датчиков D-типа редко превышает 3 м. Вблизи датчика существует некоторая «слепая» зона, размер которой зависит от конструкции датчика. Эффективный пучок света диффузионных датчиков равен размеру объекта контроля. Диффузионные датчики намного проще монтировать по сравнению с датчиками Т и R-типа, так как при этом не требуется совмещения оптических осей излучатели и приемника или датчика и мишени. По этой же причине датчики D-типа наиболее устойчивое к вибрациям решение из числа оптических датчиков положения.
|
|
 Скачать статью в формате PDF
Скачать статью в формате PDF





Рекомендуем прочитать также

- Комментарии