


Выбор преобразователя частоты для привода переменного тока
Правильный выбор преобразователя частоты совместно с двигателем позволяет создать эффективный и долговечный привод для практически любого вида механизмов промышленного или бытового применения.
Асинхронный двигатель с короткозамкнутым ротором – самый простой и надежный тип оборудования, используемого в промышленных двигательных установках машин и механизмов. С появлением современных силовых полупроводниковых устройств, таких как IGBT-модули и GTO-тиристоры, были разработаны частотные преобразователи, которые позволяют регулировать скорость электродвигателей в широком диапазоне, одновременно контролируя силу на валу привода.



Принцип работы преобразователя частоты для асинхронного двигателя основан на зависимости скорости вращения и момента силы на валу двигателя переменного тока от частоты напряжения питания. Частотные регуляторы изменяют частоту поданного на электродвигатель напряжения, тем самым регулируя скорость вращения ротора и момент силы.
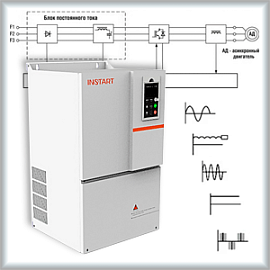
Структурная схема преобразователя частоты для асинхронных двигателей:
 |
1 – управляемый или неуправляемый выпрямителе; |
Правильный выбор преобразователя частоты для асинхронного двигателя позволяет создать эффективную и надежную систему практически для любого типа машин, как для промышленного, так и для бытового применения.
Когда речь идет о мощности движка, подразумевается механическая мощность на валу. При подборе электродвигателя необходимо учитывать КПД и коэффициент мощности. Момент на валу генератора постоянного тока обычно представлен двумя составляющими:
- статической: момент, затрачиваемый на преодоление сил сопротивления и трения в рабочем механизме;
- динамической: момент, затрачиваемый на преодоление инерции маховых масс самого электропривода, присоединенной трансмиссии и рабочего механизма.
Существует довольно широкий класс промышленных механизмов, в которых момент на валу электродвигателя однозначно связан со скоростью вращения, а режимы пуска и торможения составляют незначительную часть рабочего цикла (центробежные насосы и вентиляторы, транспортеры, конвейеры, рольганги и т.п). В этих случаях тяговый преобразователь можно выбрать в соответствии с мощностью оборудования: номинальная мощность должна быть больше или равна мощности, потребляемой мотором через цепь питания.
Для регуляторов частоты, предназначенных для работы в составе транспортеров и конвейеров характерна перегрузочная способность до 150%, а в приводах вентиляторов и насосов – до 120%. С учетом этого, в некоторых случаях можно выбрать преобразователь на ступень ниже по мощности.
Из двух компонентов электропривода – частотник и электродвигатель – второй существенно «крепче» в электротехническом отношении. В асинхронном двигателе с короткозамкнутым ротором, например, при прямом пуске ток может достигать значения в 5…7 раз выше номинального, а в некоторых случаях – до 12. Если температура обмоток не превышает установленную, такой режим обходится без последствий. Частотный преобразователь обладает более скромными возможностями из-за ограничений силовых полупроводниковых приборов. В большинстве моделей допустимый предел перегрузки находится в диапазоне 120…200% по отношению к номинальному току. Поскольку ток двигателя напрямую определяет усилие на валу, очевидно, что динамические возможности привода будут определяться ограничением тока частотника. В этих случаях обязательна проверка механизма по предельному току при выполнении разгона максимальной интенсивности, или наоборот, возможность обеспечения времени разгона при предельном токе.
Если предельный ток превышает ток ограничения системы, или время разгона больше, чем требуемое, необходимо выбирать частотник, стоящий выше по шкале мощностей. Иногда производитель указывает допустимое время разгона при предельно допустимом токе – до 60 сек.
Схема асинхронного двигателя с короткозамкнутым ротором (реверсивный пуск):
") |
QF – автоматический выключатель; KM1, KM2 – магнитный пускатель; KK – тепловое реле; FU1, FU2 – предохранитель; SB2 – «реверс»; SB3 – кнопка «стоп»; SB1 – кнопка «пуск»; M – электродвигатель. |
Как выбрать преобразователь частоты для асинхронного двигателя? Правильный выбор оборудования невозможен без учета решений по режимам торможения:
- Рекуперативное торможение с передачей энергии в электросеть.
- Динамическое торможение с отводом энергии промежуточного звена частотника на дополнительное сопротивление.
- Торможение противовключением. Обмотка привода подключена к постоянному напряжению; возникающий магнитный поток способствует появлению тормозного усилия, при этом энергия рассеивается на обмотках электродвигателя и в источнике постоянного напряжения.
После согласования значений напряжения, количества фаз и частоты питающей сети важно оценить диапазоны колебаний этих характеристик в реальных условиях эксплуатации. Значительные динамические нагрузки приводят к сильным колебаниям напряжения питания. Это можно оценить, зная реактивное сопротивление питающей сети или, по крайней мере, частичного комплексного электрического сопротивления, вносимого питающим трансформатором и подводящими кабелями. Ситуация усугубляется, когда для частотного преобразователя требуется сетевой дроссель. Падение напряжения питания частотника при максимальных нагрузках должно оставаться в допустимых пределах. В противном случае необходимо определить: позволяют ли функциональные возможности регулятора сохранить работоспособность оборудования при провале питающего напряжения.
Главный вопрос подбора частотника по этим критериям – выбор метода управления. Различают 4 метода управления:
- Скалярный метод: подходит для электроприводов с известной взаимозависимостью момента электродвигателя и частоты вращения. При этом диапазон регулирования должен быть невелик, минимальная частота 5…10 Гц.
- Скалярный метод управления с обратной связью по вращающему моменту. Применяется для точного поддержания и регулирования оборотов механизма. И здесь необходимо знать точную взаимозависимость нагрузки и скорости. Обычно в режиме скалярного управления реализуется определенного вида соотношение U/f (питающее напряжение к частоте питающего напряжения).
- Векторный метод управления. Применяется в случаях, когда взаимозависимость момента и скорости не известна, случайна или аналитически не выражается. Но при этом необходимо поддерживать заданное значение момента нагрузки при широком диапазоне регулирования периода вращения.
- Векторный метод управления с обратной связью по скорости. Применяется в механизмах со сложным характером нагрузки при необходимости поддерживать и момент, и скорость в широком диапазоне и с высокой точностью. Возможность реализации векторного метода управления подразумевает присутствие в составе системы относительно мощного процессора, способного в течение нескольких десятков миллисекунд произвести полный пересчет всего вектора параметров привода. В качестве датчика скорости обычно применяется инкрементальный энкодер, не всегда присутствующий в базовой комплектации.
Выпускаемые модели частотных регуляторов обладают богатым набором защитных функций, незначительно отличающимся у отдельных моделей. Поэтому подбор по защитным функциям важнее проводить с точки зрения наличия возможностей, обеспечивающих сохранение работоспособности электропривода в аварийном режиме. Необходимо установить, каковы действия оборудования после срабатывания защитных функций:
- Каким образом будет тормозиться рабочий механизм после отключения частотника. Торможение «на выбеге» не всегда приемлемо по соображениям безопасности.
- Возможно ли сохранение работы привода с пропорциональным изменением скорости или автоматический перезапуск (например, при отключении сети питания), «подхват» вращающегося двигателя в установках, обладающих эффектом «ветряной мельницы», или двигающегося по инерции (при восстановлении питания) и т.п.
Если имеющиеся функциональные возможности обеспечивают сохранение работоспособности мотора или даже обеспечивают приемлемый режим его работы, то можно считать, что вопрос выбора оборудования по критериям защитных функций решен.

Место установки и эксплуатации частотного регулятора должно полностью удовлетворять паспортным требованиям по температурному диапазону, влажности, высоте положения, условиям вибрации и запыленности, степени защиты по IP. Однако есть один неочевидный момент, влияющий на выбор частотного преобразователя для асинхронного двигателя при конкретных условиях размещения. Существенным является расстояние удаленности тягового преобразователя от электродвигателя. При превышении определенного расстояния, зависящего от модели частотника, типа кабеля, тока и др., необходима установка специального моторного дросселя. Появление этого элемента снижает эффективные характеристики привода. В качестве альтернативы возможен переход к другой модели частотного преобразователя.
 Скачать статью в формате PDF
Скачать статью в формате PDF




 Преобразователь частоты")



- Комментарии