


Настройка пид-регулятора частотного преобразователя
Настройка ПИД-регулятора преобразователя частоты необходима для поддерживания в оптимальном состоянии таких параметров, как уровень, давление, температура.
ПИД-регулятор – это эффективный инструмент для поддержания одного или нескольких технологических параметров на определенном уровне или в заданном диапазоне. В приборе реализованы специальные алгоритмы и зависимости, которые учитывают текущее реальное значение параметра, уставку, разность между ними, динамику изменений. Правильно настроенный регулятор способен надежно и стабильно поддерживать заданную величину, оперативно реагируя на любые воздействия на регулировочный контур извне.
Необходимость ПИД-регулирования частотных преобразователей
Электропривод в промышленности является важным элементом технологической системы. От его работы зависят многие параметры, такие как давление, температура, скорость потока, расход и т.п. Настройка ПИД-регулятора для частотного преобразователя, который управляет вращением электродвигателя, позволяет получить контроль над параметрами и поддерживать их в оптимальном состоянии.
При использовании двухпозиционных методов регулирования, где работа происходит по циклу «включить/выключить» высокой точности достичь не удастся. При этом оборудование постоянно будет запускаться в номинальном режиме и останавливаться, что, в зависимости от нагрузки, не очень хорошо сказывается на техническом состоянии. Регулирование через частотник позволяет добиться высокой точности при оптимальном режиме работы оборудования. Постоянные запуски и остановы приводов полностью исключены. Двигатель будет постоянно работать, поддерживая регулируемый параметр на определенном уровне. Это позволяет не только достичь поставленных технологических задач, но и продлить срок службы оборудования.
Частотные преобразователи с ПИД-регулированием




Работа ПИД-регулятора
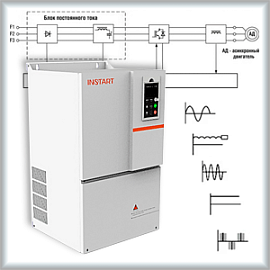
Классический регулировочный контур состоит из ПИД-частотника, аналогового датчика с унифицированным выходом (4-20 мА, 0-10 В) и электроприводом. Регулятор считывает показания с измерительного устройства, сравнивает их с заданной уставкой, по заданному закону регулирования изменяет свое воздействие, то есть скорость вращения электромотора.
Для корректной работы прибора требуется задать три коэффициента, каждый из которых по-своему обрабатывает разность между заданной и текущей величиной. Это следующие составляющие:
- Пропорциональная. Работает напрямую, чем больше разница, тем больше формируемый пропорциональный сигнал. Недостаток – постепенное накопление статистической ошибки, для устранения которой используют следующую составляющую.
- Интегральная. С помощью этой составляющей корректируют остаточное отклонение пропорционального сигнала. Физически правильно заданный коэффициент позволяет исключить влияние инертности и запаздывания технологического узла на регулировочный контур.
- Дифференциальная. Как и интегральный коэффициент, корректирует инертность системы, позволяет предугадать параметры ее работы в будущем. Правильно подобрав постоянную дифференцирования, можно снизить колебания и добиться максимальной точности регулирования.
В зависимости от сложности системы и ее характеристик (динамика, инертность, чувствительность и т.п.), некоторые параметры задавать необязательно. Простые контуры могут успешно работать только на П или ПИ законе, или любой другой конфигурации.
Основные принципы настройки параметров пид-регулятора
Настройка ПИД регулятора частотного преобразователя необходима для определения оптимальных значений трех составляющих. Правильный подбор коэффициентов позволяет настроить систему на стабильную работу и высокоточное поддержание технологических величин на заданном уровне.
Методов поиска оптимальных значений существует множество, но многие из них неприменимы на реальной практике. Связано это и с временными затратами, и с невозможностью проведения теоретических расчетов системы, так как множества параметров просто неизвестны. Поэтому самый классический инженерный способ – «эмпирический метод», то есть подбор параметров для корректировки работы системы в режиме реального времени.
Стоит напомнить, что первым шагом при конфигурировании частотного преобразователя является настройка параметров электропривода. Для этого в частотнике указывают номинальные значения тока, напряжения, количество оборотов в минуту, коэффициент мощности и ряд других характеристик (защиты, кратность пусковых токов и т.п.). После этого можно переходить к настройке ПИД-регулятора:
- Выставляем нулевые значения для интегральной и дифференциальной составляющей.
- Подбираем пропорциональный коэффициент так, чтобы отклонение было минимальным, и автоколебания были стабильными.
- Выставляем интегральную составляющую для минимизации колебаний.
- Дифференциальным коэффициентом корректируем рабочую скорость и точность контура регулирования.
Настройка пид регулятора на примере

Теоретическая часть настройки ПИД регулирования в частотных преобразователях может показаться сложной и не совсем понятной. На практике этот процесс намного проще и быстрее. Поэтому нет ничего лучше практического примера на реальном оборудовании с комментариями специалиста.
Для этого мы предлагаем посмотреть наше видео, где инженер компании «РусАвтоматизация» настраивает ПИД-регулятор частотного преобразователя под реальную систему, в которой регулировочный параметр – уровень воды в баке. В видеоролике показаны все основные моменты: подключение датчика к ПЧ (в роли сенсора используют калибратор), настройка измерительной характеристики и задание базовых параметром для ПИД-регулятора.
 Скачать статью в формате PDF
Скачать статью в формате PDFВас может заинтересовать










- Комментарии