


Частотный электропривод. Эффективность применения частотно-регулируемых приводов
Установка частотно регулируемого привода дает возможность прямой настройки производственных параметров (давления, скорости движения механизмов, температурного режима), сохраняя при этом высокий КПД и многократно снижая затраты на электроэнергию.
На сегодняшний день уже невозможно представить современное промышленное производство, транспортные системы, любую сферу жизнедеятельности человека без применения в них электрических двигателей. Для обеспечения непрерывного и энерогоэффективного управления технологическими процессами, в которых используются электродвигатели, применяется частотно-регулируемый привод (ЧРП), основным звеном которого, помимо двигателя, является преобразователь частоты (сокращенно называют – ПЧ, или просто «частотник»).
Преобразователи частоты
|
В связи с развитием микропроцессорной техники и электроники современные частотные преобразователи обладают следующими преимуществами:
|
Преобразователи частоты
|

Преобразователи частоты являются довольно универсальным приводным устройством, предусмотренным для работы в различных областях промышленности и производства. Но для каждого применения необходимо учитывать технологические особенности функционирования оборудования, которым будет управлять частотник, для оптимального использования имеющегося у преобразователя набора характеристик. Также это напрямую будет влиять на эффективность и бесперебойность работы самого частотника и электроприводного комплекса в целом.
Для понимания особенностей функционирования преобразователя частоты подробнее рассмотрим его устройство.
Устройство и принцип работы преобразователя частоты
Частотные преобразователи реализуют по схеме, состоящей из силовой и управляющей части. Силовая часть содержит в себе транзисторные, либо тиристорные элементы, работающие в качестве электронных ключей. Регулирование их работы производится при помощи цифровых микропроцессоров, которые помимо управления "ключевой" схемой еще выполняют функции защиты, диагностики и сопряжения с внешней системой управления преобразователем частоты.
В зависимости от принципа построения силовой части преобразователи можно разделить на 2 типа:
- преобразователи частоты с промежуточным звеном постоянного тока;
- без звена постоянного тока (ПЧ с непосредственной связью).
Одним из первых типов преобразователей частоты были именно «частотники» с непосредственной связью. Силовая часть данных устройств основывалась на тиристорных элементах и представляла собой управляемый выпрямитель.
При работе ПЧ группы тиристоров в определенной последовательности открывались, подавая напряжение на обмотки двигателя. Выходное напряжение таких преобразователей имело "пилообразную" форму, а его частота не могла превышать частоту питающей сети. Диапазон регулирования в преобразователях частоты без звена постоянного тока довольно мал – не более 1:10, что является недостаточным в современных реалиях управления технологическими объектами. Вследствие чего, в настоящий момент применение ПЧ подобного типа ограничено для большинства применений в связи с высокими требованиями, которые предъявляются к характеристикам входного напряжения и диапазону регулирования.
Вышеназванные недостатки ПЧ с непосредственной связью были решены в современных преобразователях частоты со звеном постоянного тока, силовая часть которых состоит из выпрямителя, фильтра и транзисторного инвертора.
Типовая схема и принципы работы ПЧ со звеном постоянного тока показаны на рисунке:
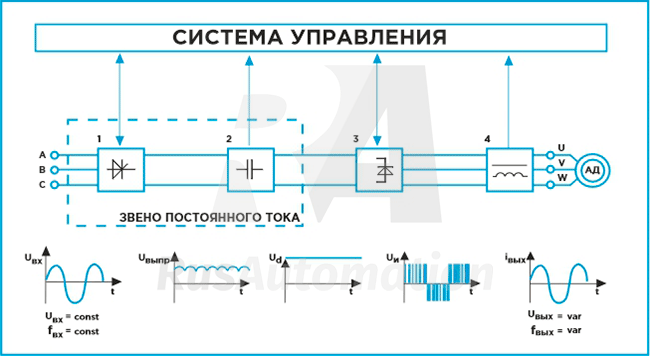
В таких устройствах питающее напряжение преобразовывается дважды: входное напряжение выпрямляется в выпрямителе (1), сглаживается на фильтрующих элементах (2), и далее преобразуется в инверторе (3) в выходной сигнал с широтно-импульсной модуляцией (ШИМ). При необходимости на инверторном выходе до двигателя устанавливается моторный дроссель (4) для сглаживания токовых пульсаций.
На инверторе постоянное напряжение преобразуется в трехфазное переменное с изменяемой частотой и амплитудой. Микропроцессорное устройство в ПЧ подает сигналы управления на силовые транзисторы инвертора, формируя практически синусоидальный сигнал необходимой формы. Наибольшая ширина сигнальных импульсов – в середине полупериода, а в начале и ближе к окончанию полупериода она уменьшается, тем самым обеспечивая ШИМ-модуляцию напряжения, которое подается на обмотки двигателя.
Подобное построение силовой части ПЧ позволило преобразователям со звеном постоянного тока обеспечить:
- широкий диапазон регулирования (до 1: 10 000);
- быстродействие электроприводного комплекса в целом;
- возможность регулирования частоты вращения на низких оборотах двигателя;
- снижение уровня высших гармоник ПЧ и пульсации момента;
- увеличение срока службы преобразователя частоты и управляемого им электродвигателя.
Относительно алгоритмов контроля и управления работой преобразователей частоты на практике подразделяются следующие методы управления:
- скалярное управление;
- векторное управление.
Скалярное (частотное) управление электродвигателем переменного тока используют там, где требуется поддерживать постоянным отношене напряжения к частоте.
Векторный принцип управления относительно скалярного – более производителен, имеет широкий диапазон и точность регулирования (в том числе на малых оборотах двигателя).
Метод управления выбирается в зависимости от требований, которые необходимы для выполнения технологического процесса.
Более подробно о различиях и особенностях применения скалярного и векторного метода регулирования можете прочесть в одной из наших предыдущих статей.
Пример эффективного применения ЧРП

В качестве одного из объектов частотно-управляемого привода, где применение ПЧ качественно повышает эффективность всего технологического процесса, можно привести в пример подъемные механизмы, в частности – лифтовое оборудование. Учитывая тяжелые условия эксплуатации подобного оборудования, повторно-кратковременные режимы при частых включениях/отключениях, установка частотно-регулируемого привода является эффективной возможностью увеличения технологичности и оптимизации подъемных процессов, позволяя:
- Существенно снизить энергопотребление привода (в среднем, частотный электропривод для управления лифтовым оборудованием экономит до 40% электроэнергии (по сравнению с применениями без ПЧ).
Тем самым значительно уменьшаются затраты на энергоресурсы и есть возможность в минимальные сроки окупить средства, которые были вложены в модернизацию. - Осуществлять плавный запуск, разгон и остановку лифтовых механизмов, обеспечивая необходимое значение крутящего момента двигателя на небольшой частоте вращения и режим “противоотката” кабины лифта.
Это позволит увеличить срок службы электродвигателей и механических частей механизма, уменьшить затраты на техническое обслуживание приводного комплекса, гарантировать оптимальный рабочий режим лифта. - Дополнить защитные функции системы.
Данная опция позволит комплексно защитить привод по токовой перегрузке, перенапряжению, утечек, фазных обрывов и т.д. - Выполнить сброс излишней энергии при остановке приводного механизма.
Это осуществляется при помощи подключаемых к частотнику тормозных резисторов, либо посредством рекуператоров энергии для максимально эффективного управления частотным приводом (в этом случае излишняя энергия будет возвращаться обратно в питающую сеть). - Модернизировать производственный цикл за счет широких возможностей управления работой привода и процессами торможения.
Применение ПЧ обеспечивает точное регулирование скорости движения и положения кабины с помощью датчиков обратной связи (диапазон регулирования скорости 1:1000, точность поддержания скорости составляет 0,01%).
По статистике подобных применений, при внедрении преобразователей в лифтовых системах окупаемость частотного регулируемого привода не превышает 2 лет. При этом сокращаются затраты на обслуживание и ремонт лифтового электропривода.
Выводы
Применение преобразователей частоты при управлении электроприводами позволяет напрямую подстраивать регулируемые производственные характеристики (температуру, давление, скорость движения рабочих механизмов) под различные нужды с сохранением высокого КПД, обеспечивая при этом существенное снижение энергопотребления. Поэтому внедрение частотно-регулируемого привода позволяет решать задачи не только в области автоматизации процесса производства, но и в сфере энергосбережения.
Осуществляя на практике подбор частотного регулируемого привода, необходимо оценить требования, которые предъявляются к объекту управления – это диапазон и точность регулирования, необходимость удержания определенного момента на валу двигателя (в частности, при небольших частотах вращения) и требования к работе электропривода в аварийных ситуациях.
По вопросам подбора оборудования применительно к вашим техническим требованиям
и условиям применения обратитесь к специалистам компании ООО «РусАвтоматизация»
 Скачать статью в формате PDF
Скачать статью в формате PDFВас может заинтересовать



















- Комментарии